 Bilal
Bilal 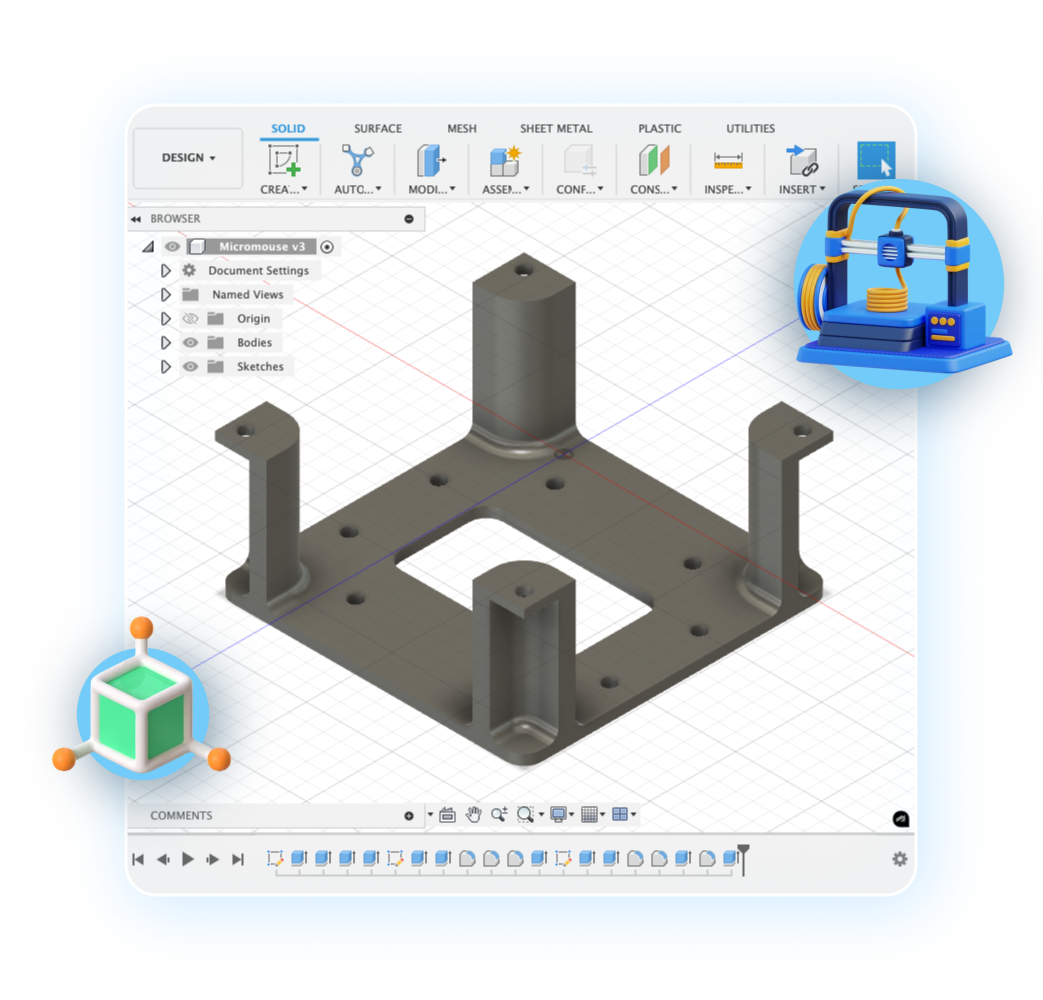
Mechanical Design
How the robot was designed to house its components while maintaining structural integrity.
3D CAD: Several prototypes were carefully sketched and reiterated thanks to history tracking in software like Fusion 360.
3D Slicing: Infill percentage and support type were thoughtfully chosen, considering the structural loads on the chassis and multiple cavities.
3D Printing: PETG polyester material was prioritised due to its durability and good layer adhesion compared to other materials like ABS & PLA.